
 ÚõçÙšÇ
ÚõçÙšÇ








 šÏŠˋÇÚ ššÊÚ
šÏŠˋÇÚ ššÊÚ
 šÏŠÑÚ ššÊÚ
šÏŠÑÚ ššÊÚ
 š¿ÇÚ˜Ú¡(šÈ¥š¯´Ú) ššÊÚ
š¿ÇÚ˜Ú¡(šÈ¥š¯´Ú) ššÊÚ
 šŠÚ ššÊÚ
šŠÚ ššÊÚ
 Easy Solar Kit
Easy Solar Kit šÑš š ššÊÚ
šÑš š ššÊÚ
 ÚšõÇ š¡ŠýÚ¯
ÚšõÇ š¡ŠýÚ¯
 ÚšõÇ õÇŠ ´ ŠÊŠË¡ š Ú
ÚšõÇ õÇŠ ´ ŠÊŠË¡ š Ú
ÚšõÇ šýÙš ŠÀŠÇ-B30M2 š˜šˋ šÏš¿´
ÚšõÇ šýÙš ŠÀŠÇš š˜šˋšÇ õ¯Ú¡Úõ° õ¯Ú¡ÚˋŠŠÊ. šŠšš š˜šˋ õ¯šÇŠš ŠÚÇ ššŠ°Çõý šçŠŠÊ.
1.šÏšŠŠ š˜šˋ šŠŠÎ˜šÊ
šššÝŠÊ:
2.1š˜šˋ š Úš¡
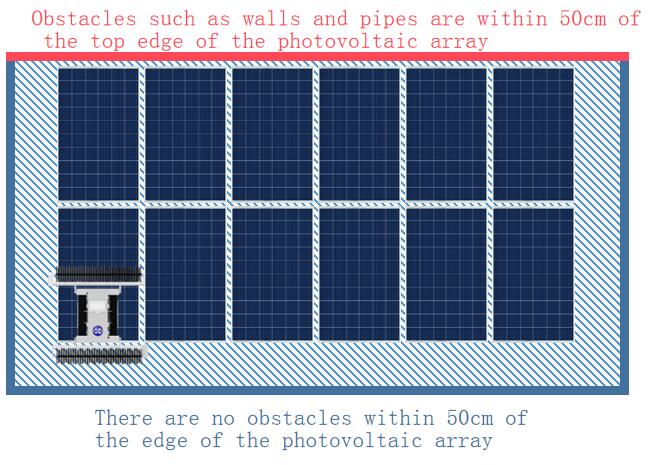
2.1.1 õñ¡ŠÎ§š Úš Ú õ¯šŠË¥ Š¯ˋšÏÚõ¡¯ šÚÇ Ú¡Š ÚŠˋÇš šýÙõý¯š Úš¡ÚšÙššÊ. (š ŠËš¯´šÑõ°¥ ÚŠËš¯´šÑš Š°Ú Š¯ Úšš Š¯ˋšÏÚõ¡¯ šÚÇ Ú¡Š šŠÑš ŠÏÊŠ˜ŠÎ¯ ŠÑŠÑš ŠÊšÇš˜ŠÎ˜Š õýš õ¡šÏŠšÇ ššçŠŠÊ.)

2.1.2ŠÚŠ¯ˋšÏš¥šš Š¿š šš Š¯ˋšÏÚõ¡¯ šÚÇ ŠÚŠ¯ˋšÏš¥š šŠš šÇŠ˜¥šÏšÇ šŠšÏ Úš¡ÚŠÊ. (š¡ŠÑš Úš¥ŠÀ šš¯ˋÚŠ õýš šõýˋÚ õ¡šÏŠšÇ ššçŠŠÊ)

2.1.3ššýÇ šýÙš šÏšÈ¥ŠˋÇš ŠÙŠ¿ŠË¥ Úš¡Úõ° šŠ šýÙš šÏšÈ¥ŠˋÇš š¡ÀŠˋÇšÇ Ú¡Šš õ¯õ¿šÇšÏ õÇš¯¯Úš˜ Ú¡Šš õñ¡ŠÎ§šÇ Ú˜õý õ¯šÚŠ õýš Š¯ˋšÏÚˋŠŠÊ.

2.1.4šÊš ÚÀš š£ç šÇš Š¡ŠÎ˜š ÚÀš š£ç Š¯ŠËš šŠ ÚÀš ÚŠˋÇš šýÙõý¯ŠŠË¥ Úš¡Úõ° õñ¡ŠÎ§Š ËšÇ Ú˜õý õ¯šÚš˜ šŠ šš š šÚËš Š₤¡š¿Š õýš Š¯ˋšÏÚõ¡¯ šÚÇ õ¿´ŠÚšÏ Úš¡ÚšÙššÊ.

2.1.5Š ¡õÇ ššš š¿ÇŠˋŠ¥ Š šÎš šš Š°¡šýÇš šýÙõý¯ šÚŠË¥ Úš¡Úõ° , ÚŠ¿õ°¥ Š´¥šÏõ¯ š¿ÇŠˋŠ¥ŠË¥ õ¯šÙÚšÏ šŠŠÀ ššÇŠˋ Š¡Š˜šõ¯ Š ¡šÑ ššš Ú˜šŠˋÇ ššÙš šš Ú ŠÛŠšÏ Úš¡ÚšÙššÊ.

2.1.6ŠÀÊŠ˜ Š¡Š˜š šÇš Š¡ŠÎ˜š š Úõ°¥ Š°Ú š˜ŠÑŠË¥ Úš¡Úš˜ šýÙš Ú´õ°¥š šÚËš Š₤¡š¿šÏ šŠŠÀ ÚˋŠŠÊ.

2.2šËš š Ú
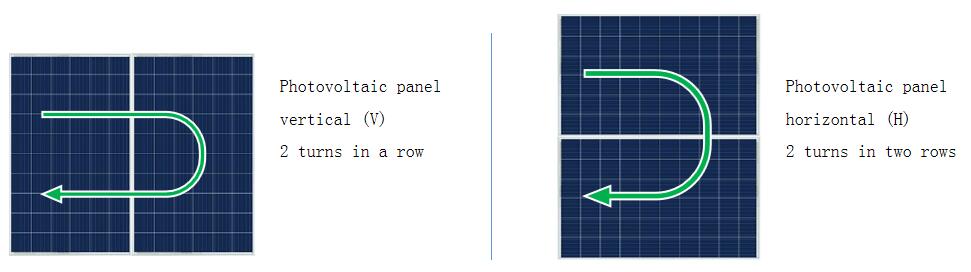
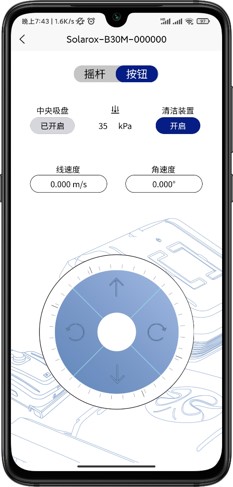
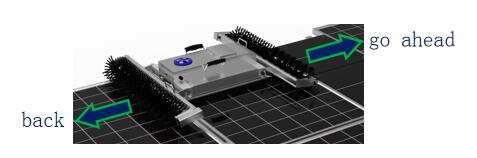
2.2.1(Úš š)Š (ÚŠ¿ Úš š)š (šŠ Š¯¯šÇ Ú š)ŠË¥ õ°ÝÚ õýõ°¥ õ¯šçŠŠÊ.
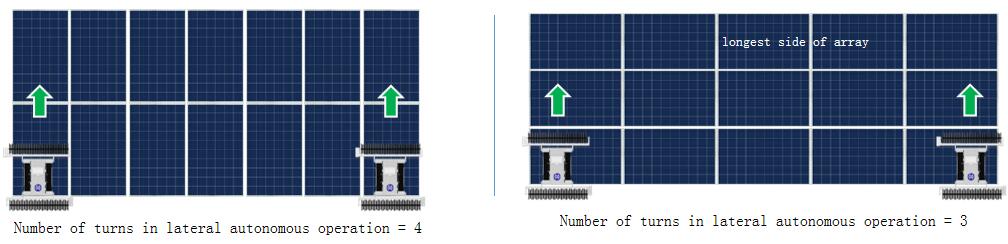
2.2.2 šÚ šš´ šÇš š Úš šŠË¥ šçšÚÚõ° Ú´š´šÝš õñ¿ŠÚÚ š šŠŠÀ PV šÇŠ šÇš õ¯šË õ¡Ç š¡ÀŠˋÇ(šŠ´)š ÚËÚ šËš¿ŠË¥ ššš š¥ŠÀ š ÚÚˋŠŠÊ.
2.2.3š¥Š¯š š¥ŠÀ šËŠ¿š šñ´õ¡ Š¯ šŠš Ú¡ŠÎ˜Ú ŠˋÇšÇ ššŠ´, šÎ šÇŠ šÇš ÚŠ´š¥ŠÀ š˜šˋŠˋŠŠÊ.
2.3ŠÑÚ ããšËš¿
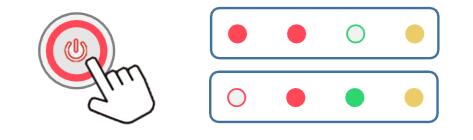
2.3.1š š š¥õ¡¯
š š ŠýÚ¥š ŠŠ˜ šËš¿ŠË¥ ššÚõ° šý¨ ŠýšÏ¡ Š¿´õ¯š ÚšŠÝšÇ õ¤¥šÏŠˋÇ šËš¿õ¯ š ššÇŠˋ¯ šÇõ¡¯Ú šÚŠÀ ŠÊšÇõ¯ŠŠÊ.
2.3.2šš¿ õçš
šËš¿š õ¯ŠÀ šÊš˜šÑš šÀ¯š Úš˜ šŠšˆ§ Šˆ´šŠÎ˜š Š ŠýšÏ¡ Úõ°¥ š¡ ŠýšÏ¡ Úš š š˜šÇš šÊ õ¯õýˋš ŠÏšÑõ° š¡ŠÀ šÊš˜šÑš š¡ ŠýšÏ¡ Š¯ ŠÊ ŠýšÏ¡ šÇš š š˜šÇš õ¯õýˋš š ŠÏšÑËŠŠÊ. ÚŠ´ Šˆ´šŠÎ˜.
*Šõ¡¯ Ú š š¥šˆ§ šÏšÏÚšŠ šÊš šš¿ŠË¥ ŠÚŠÇŠ õ瘊ˋ šš¿õ¯ ššÇ šš¿ Š°Çš š šÏšÚ š ššçŠŠÊ.
2.3.3šš šš
Š ¿š ÚšŠÝšÇ ÚÙš š¥š ¡ šõ° Š¿´õ¯š ÚšŠÝšÇ ÚÙš õ¤¥š ¡ šõ° (ŠÑš õ¯ Ú Šý š¡ŠÎ¥) šÇõ¡¯Úõ¯ šÝõ°çš šÇŠˋÇ(š§ 22šÇ) šš/Šõ¡¯ ŠýÚ¥š ŠŠ˜ šËš¿õ¯ Š ŠÎ§š š¥ŠÀ šŠÚŠŠÀ Ú š ššçŠŠÊ.

2.4õ¡¯ŠËš ššˋ
2.4.1šš´ šš
šËŠˋÇš ÚšÝÚ Š¯ šŠ°šÇ šŠÈŠ Ú Š ŠÎ§š š¥ŠÀ ÚšõÇ šÇŠ šÇš šŠ´š š˜Š¥õ¯ Š¯ˋÚËš Ú šÊÚ¡ÚˋŠŠÊ. Š¯ˋÚËš õý¯š Ú Ú š¡ÀŠˋÇ šš š ššÚõ° Úš Úš˜ šÇŠ šÇõ¯ ŠÛš¥ Šõ¿šÏ šÇŠ šÇš ššˆ§š õÝñõ° šÈ¥š¯´ Šˆ´Šš Š¯Š¥ Šš š š ÚÚˋŠŠÊ.
2.4.2š š Š°çõñ
šš´ šŠ šÊ Š¯¯Ú¯ŠÎ˜ š ššÇ ŠÑšÀÝÚŠˋÇ šËš¿õ¯ šŠš¥ŠÀ š š š Š°çõñ Šˆ´ŠŠÀ ŠÊšÇõ¯ šš šš¿ŠÀ Ššõ¯ŠŠÊ.
2.4.3šÊŠ´š š¯š
šýÙš ššÙš š¥ŠÑŠË¥ Š ŠÎ§š š¥ŠÀ õÝÇŠŠ¯ŠŠÀ š ÚÚõ° ŠÏšÏŠÏ š š Š°çõñ ŠŠ šŠ ŠýÚ¥šÇ šŠš šÊŠ´Ú šš¿ŠË¥ š¯ƒš ŠÊš õñ¡õ°°šš šŠš õ°šÚõ¡¯ ššÚˋŠŠÊ.
šššÝŠÊ:
2.5.1õ¡¯Š°¡ šÚ¡ššˋ
šËš¿ šÚ Úš Š¯ Šˆ´Š š˜šˋš šÏš šÊš .

2.5.2ŠÎ˜Šˆ´š£´ Šˆ´Š
šËš¿š šŠ š šÇŠË¥ šÚ šÀ¯šÇšÊÚÝ Š¯ ŠýÚ¥ Šˆ´Š
* šõýˋ š šÇ Šˆ´ŠŠ šËš¿ ššýÇŠË¥ õ¡¯šÊ šÂÚõ°ŠÀ ÚŠ ÚÊŠ Šˆ´Šš
ŠŠÊ.
* šÏŠÎ˜ ŠŠ šÇšš š¯¡šÀ¯ šÂÚõ°ŠË¥ š˜šˋÚŠ ÚÊŠŠÎ˜šÊ Šˆ´Š Šš .
š¿ÇÚ õ° ŠÎ˜
š Š¡ŠÀõñ¡
š ښNJ õ¯õýˋÚš ŠÚ Š˜¡šš˜ÚÙš Š´õý´šÈ¥šŠˋÇ 24šõ¯ šÇŠÇš š¯Š§ŠŠÎ˜õý šçŠŠÊ.
 RM502, Sihai Smart Zone, No.189, Fanghu West Road, Huli District, Xiamen, Fujian, China.
RM502, Sihai Smart Zone, No.189, Fanghu West Road, Huli District, Xiamen, Fujian, China.





ôˋ Copyright: 2026 Xiamen Wintop New Energy Tech Co., Ltd.. All Rights Reserved.

IPv6 network supported



